
Santa Klāra, Kalifornija, 2025. gada 26. augusts, Chainwire
Pie ADAS un autonomo transportlīdzekļu tehnoloģiju samits ZiemeļamerikaVerdzība Ravrvadošais decentralizētais fiziskās infrastruktūras tīkls (DEPIN), kas veido telpisko AI pamatus, ar lepnumu paziņoja par palaišanu ROVR atvērta datu kopa -Augstas izšķirtspējas, daudzmodālu datu kopa, kas paredzēta, lai paātrinātu jauninājumus Telpiskā AIVerdzība autonoma braukšanaVerdzība robotikaun digitālais dvīnis pieteikumi.
Šis izlaidums vienā no nozares premjerministra pulcēšanās uzsver ROVR apņemšanos atbalstīt autonomo transportlīdzekļu ekosistēmu ar atvērtiem, augstas precizitātes datiem, lai uzkurinātu nākamās paaudzes inteliģentās mobilitātes risinājumus.
Datu kopa iezīmē nozīmīgu pagrieziena punktu ROVR misijā demokratizēt piekļuvi augstas kvalitātes reālās pasaules datiem un atbloķēt nākamās paaudzes AI modeļus, kas saprot un mijiedarbojas ar fizisko telpu.
Uz cilvēku orientēts skats uz pasauli
Atšķirībā no tradicionālajām datu kopām, kas vērstas tikai uz mašīnas redzējumu, ROVR atvērtā datu kopa uztver Pasaule, kā redzams cilvēku autovadītāji – ieskaitot to, ko viņi redz, kā viņi pārvietojas un kā viņi mijiedarbojas ar apkārtni.
Apkopoti, izmantojot ROVR pasūtījuma veidotās mobilās uztveres vienības-kuras pārvalda globāls līdzautoru tīkls-datu kopa ir daļa no ilgtermiņa centieniem veidot pasaulē lielāko atvērtās piekļuves braukšanas datu kopu ar a Mērķis 1 miljons 30 sekunžu klipiemApvidū
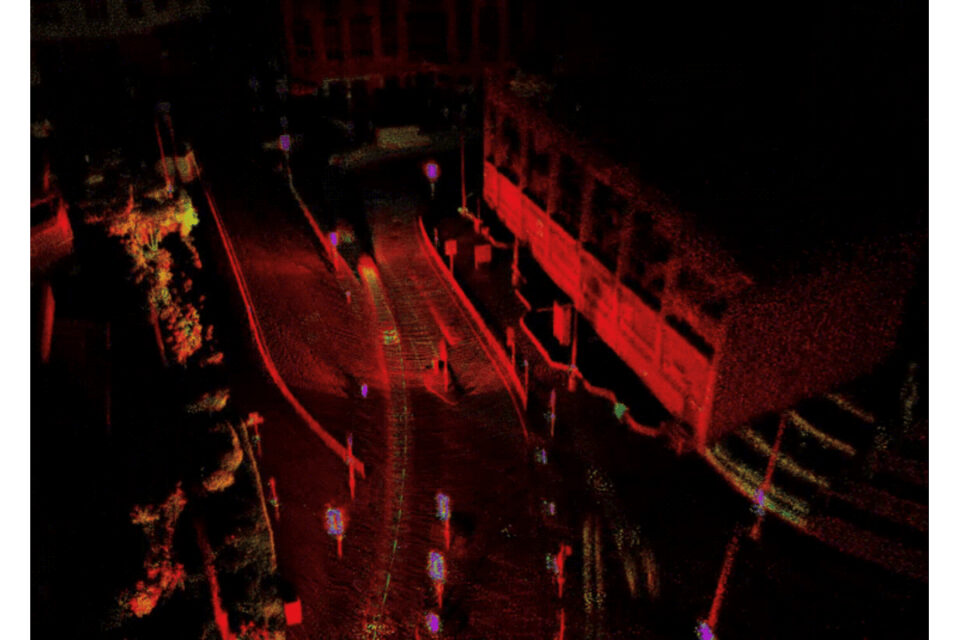
Katrā klipā ir:
- Neapstrādāti lidara punktu mākoņi detalizētai 3D telpiskajai rekonstrukcijai
- Augstas izšķirtspējas RGB video no uz priekšu vērstām Dashcams
- Augstfrekvences IMU dati Kustības dinamikas uztveršana
- Centimetra līmeņa RTK GPS lokalizācija Precīzai zemes patiesības pozicionēšanai
- Anonimizētas ainas Privātuma saglabāšanai un ētiskai AI attīstībai
Sākotnējā atvērtā izlaišana ietver 1500 pilnībā sinhronizētus klipus, kopā vairāk nekā 1 TB datu. Šie klipi piedāvā daudzveidīgu pārklājumu pilsētu, piepilsētas un lielceļu vidē – ieskaitot celtniecības zonas, skolu krustojumus, satiksmes sastrēgumus un dinamiskas gājēju ainas.
Papildus neapstrādātiem sensora datiem ROVR arī veido mērogojamu anotācijas cauruļvadu semantiskai segmentēšanai, objektu noteikšanai, skatuves izpratnei un nodomu prognozēšanai-ļaujot pētniekiem un inženieriem apmācīt nākamās paaudzes fonda modeļus telpiskai AI.
Datu kopas turpmākajās versijās būs:
- Cilvēka anotētās 2D/3D ierobežojošās kastes, semantiskās etiķetes un uzvedības norādes
- Ainas grafiku ģenerēšana, lai uztvertu telpiskās un laika attiecības starp objektiem
- Darbība un nodomu etiķetes izmantošanai uzvedības modelēšanā un politikas apguvē
- Domēna daudzveidības metadati, lai atbalstītu vispārinājumu dažādos ģeogrāfiskajos un malu gadījumos
Šīs funkcijas ir paredzētas, lai atbalstītu plašu progresīvu lietojumu klāstu, ieskaitot:
- Autonoma braukšanas un ceļa plānošana
- Robotu navigācija un slam etalonuzdevums
- AR/VR telpiskā izpratne un oklūzijas argumentācija
- Multimodāls liels modelis (VLM, VLM+3D) pirms apmācības
- Digitālā dvīņu radīšana viedajām pilsētām un infrastruktūra
ROVR atvērtā datu kopa ļauj pētniekiem, izstrādātājiem un iestādēm apmācīt, etalon un izvietot nākamās paaudzes AI modeļus, kas var droši un saprātīgi darboties reālajā pasaulē. Padarot datu kopu atklāti pieejamu, ROVR mērķis ir veicināt sadarbību, reproducējamību un caurspīdīgumu globālajās AI un robotikas kopienās.
Kāpēc tagad, un kāpēc atvērt
Palaišana pie ADAS un AV tehnoloģiju samits Ziemeļamerika Nāk laikā, kad uztvere un reālās pasaules izpratne parādās kā nākamās lielās AI attīstības robežas.
Pēdējā gada laikā fondu modeļiem ir revolucionizētas valodas un tēlu izpratne, bet Telpiskā AI joprojām ir ievērojami nepietiekams, galvenokārt tāpēc, ka trūkst liela mēroga, augstas kvalitātes reālās pasaules datu kopas.
Uztvere strauji parādās kā nākamā AI robeža. Izpratne par to, kā cilvēki pārvietojas un interpretē fizisko pasauli – reālā laikā dažādās vidēs – ir būtiska, lai veidotu robustas, vispārināmas AI sistēmas. Atšķirībā no statiskām kartēm vai sintētiskās vides, reālās pasaules multimodālie dati nodrošina bagātība, neskaidrība un sarežģītība ka AI ir jāapgūst, lai darbotos droši un saprātīgi.
ROVR atvērtā datu kopa piedāvā jaunu objektīvu Cilvēka mēroga navigācija un vides izpratnepārvarot plaisu starp simulāciju un ielas līmeņa inteliģenci. Padarot šo datu kopu atklāti pieejamu, ROVR mērķis ir dot iespēju pētniekiem, izstrādātājiem un celtniekiem visā AI, robotikā un viedās infrastruktūras ekosistēmās.
Datu kopa tiek izlaista ar pieļaujamu licenci nekomerciāla lietošanaar nākotnes plāniem komerciāliem partneriem sniegt paplašinātas versijas – ieskaitot pilnas sekvences un blīvas anotācijas. Šī iniciatīva atspoguļo ROVR apņemšanos ievērot atvērta infrastruktūraVerdzība kolektīvā inteliģenceun reālās pasaules AI sistēmu atbildīga attīstība.
Uzbūvēja DePin kopiena
ROVR darbina decentralizēts līdzautoru tīkls-personas un flotes, kas aprīkotas ar ROVR spraudņu un play datu vākšanas aparatūru. Atšķirībā no Big Tech centralizētās datu vākšanas, ROVR modelis ir:
- Mērogojams – tūkstošiem ieguldītāju, pieaugot katru dienu
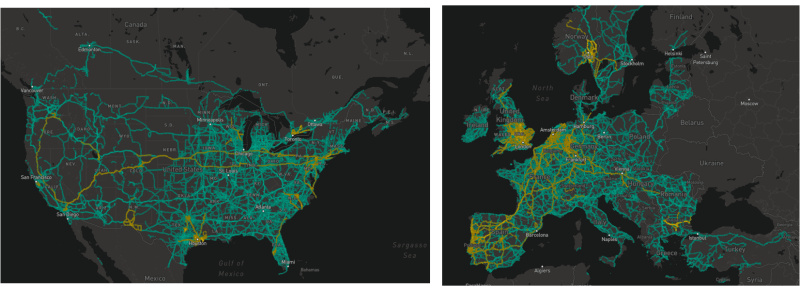
- Globāls – aptver pilsētas, priekšpilsētas un topošos tirgus
- Stimulēts – Atbalstītāji nopelna žetonus par pārbaudītu datu apmaiņu
- Komponējams – Iespējot integrāciju ar dažādām AI, AR/VR un robotikas kaudzēm
Šī vispirms šī pieeja jau ir radusies Vairāk nekā 20 miljoni kilometru ceļa seguma un vairāk nekā Izvietotas 3500 ierīcespieaugot lietošanai, palielinoties pieprasījumam pēc reālās pasaules 3D datiem.
 No datiem līdz izvietošanai
No datiem līdz izvietošanai
Ārpus neapstrādātiem datiem ROVR veido pilna kaudzes cauruļvadu telpiskajam AI, ieskaitot:
- Intelligence uz ierīces efektīvai savākšanai
- Mākonis balstīti anotācijas rīki mērogojamai marķēšanai
- API un SDK Lai integrētu 3D pasaules izpratni AI sistēmās
- Partnerība kopā ar pētniekiem, jaunuzņēmumiem un uzņēmumiem dažādās nozarēs
Atvērtā datu kopas palaišana ir pirmais solis A veidošanā kopīgs fonds Visiem, kas būvē AI-vietējo fizisko pasauli-neatkarīgi no tā, vai tās ir pašbraucošas automašīnas, noliktavu roboti, AR glāzes vai viedās pilsētas.
Kā piekļūt datu kopai
ROVR atvērtā datu kopa šodien ir pieejama lejupielādei un izpētei.
https://rovr.network/#/dataset
Pētnieki, izstrādātāji, pedagogi un novatori tiek mudināti pievienoties ROVR ekosistēmai un palīdzēt veidot telpiskās AI nākotni.
Par Rovru
Ravr ir telpiskā AI stūrakmens – decentralizēts tīkls, kas ikdienas transportlīdzekļus pārveido par inteliģentiem fiziskās pasaules 3D kartētājiem. Izmantojot globālu ieguldījumu kopienu, ROVR apkopo, struktūras un izplata liela mēroga 3D datus izmantošanai AI, robotikā, autonomā navigācijā un ārpus tās.
Ar ticību atvērta infrastruktūraVerdzība Godīgi stimuliun Globālā iekļaušanaROVR būvē pamatotu slāni inteliģentai, pirmajai planētai.
Kontaktpersona ar plašsaziņas līdzekļiem: [email protected]
Lai uzzinātu vairāk:

Saskare
Dauzīt
Xinran Li
ROVR Labs Inc.
[email protected]
🚀 Vai vēlaties, lai jūsu stāsts būtu redzams?
Iegūstiet tūkstošiem dibinātāju, investoru, PE firmas, tehnoloģiju vadītāju, lēmumu pieņēmēju un tehnoloģiju lasītāju priekšā, iesniedzot savu stāstu Techstarts.comApvidū
Piedāvājiet