
Smagas kravas pārvadāšana ar droniem mūsdienās joprojām ir liels izaicinājums. Viens multirotors spēj pacelt tikai ierobežotu svaru un ātri kļūst nestabils stiprā vējā vai sarežģītās vidēs, piemēram, piekrastes zonās vai kalnainā apvidū. TU Delftas pētnieki tagad ir izstrādājuši risinājumu, kas ļauj vairākiem autonomiem droniem strādāt kopā. Gudrais vadības algoritms ļauj tiem pacelt, novietot un stabilizēt smagus priekšmetus pat tad, kad krava sāk šūpoties. Pētījuma rezultāti ir publicēti Zinātnes robotika.
Daudzi droni veic vieglu darbu
“Viens drons var pacelt tikai ļoti mazu svaru,” skaidro robotikas pētnieks Sihao Suns. Līdz ar to bezpilota lidaparāti pašlaik ir ierobežoti izmantojami tādiem uzdevumiem kā būvmateriālu piegāde, labības transportēšana no attāliem laukiem vai palīdzība glābšanas operācijās.
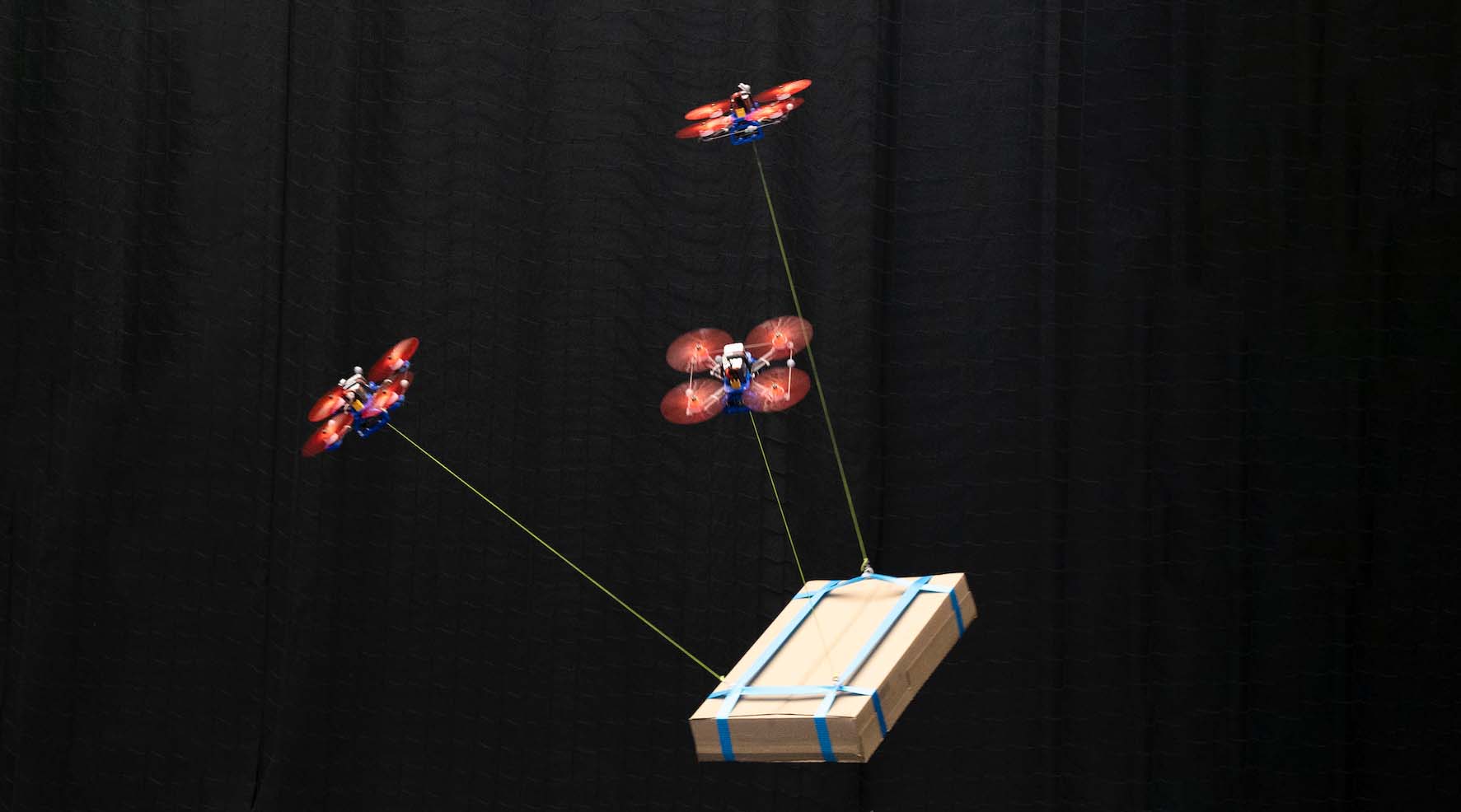
Lai to risinātu, pētnieku grupa izstrādāja sistēmu, kurā vairāki droni ir pievienoti vienai un tai pašai kravai, izmantojot kabeļus. Pastāvīgi koordinējot savu pozīciju un vilces spēku, droni var ne tikai sadalīt pacelšanas slodzi, bet arī kontrolēt lietderīgās kravas orientāciju. Tas ir ļoti svarīgi, ja kaut kas ir jānovieto ļoti precīzi sarežģītā vai pārblīvētā vidē.
Ātra reakcija ir galvenais
Īstais izaicinājums ir sadarbībā. Kad droni ir fiziski savienoti viens ar otru caur kravnesību, katra kustība vienlaikus ietekmē visus gaisa kuģus. Tradicionālie vadības algoritmi ir pārāk lēni un stingri, lai šādos apstākļos saglabātu stabilitāti.
Saskaņā ar Sun teikto, jaunais algoritms ir izstrādāts, lai ātri reaģētu uz tādiem traucējumiem kā vēja brāzmas vai pēkšņas kravas kravas izmaiņas. Sistēma paliek vienmērīga un stabila, bez nepieciešamības pēc papildu sensoriem uz paša objekta — tā ir svarīga priekšrocība izmantošanai reālajā pasaulē.
Testēšana ar šķēršļiem, vēju un basketbola bumbu
Pārbaudēm pētnieki izveidoja savus multikopterus un veica virkni reālistisku eksperimentu. Vienlaikus tika izmantoti līdz četriem droniem, savukārt līdzjutēji simulēja vēju, un basketbols kalpoja kā dinamiska krava, kas spēj kustēties neparedzami. Droni darbojās pilnībā autonomi, izvairoties no šķēršļiem un pastāvīgi kompensējot jebkuru kustību, kas varētu izjaukt to līdzsvaru. “Jūs vienkārši pasakiet viņiem, kur doties, un viņi dara visu pārējo,” saka Sun.
Šajā posmā pozicionēšanai sistēma joprojām paļaujas uz ārējām kamerām, un tāpēc tā ir ierobežota tikai iekštelpu vidē. Nākamais solis ir padarīt tehnoloģiju pietiekami izturīgu lietošanai ārpus telpām, kur droni var uztvert un pārvietoties apkārtnē neatkarīgi. Potenciālie pielietojumi ietver būvniecības projektus, lauksaimniecības loģistiku un ārkārtas situāciju reaģēšanu apgabalos, kuriem ir grūti piekļūt.
Kā tas atšķiras no Austrālijas pieejas
TU Delfta nav vienīgā iestāde, kas pēta kooperatīvos smagās pacelšanas dronus. Austrālijā pētnieki nesen demonstrēja sistēmu, kurā divi kravas droni var kopīgi pārvadāt līdz 100 kilogramiem smagu kravu.
Sun atzīmē, ka Delftas pieeja izceļas, piedāvājot daudz lielāku kontroli un elastību. Sistēma ne tikai paceļ, bet arī stabilizē un pagriež kravnesību — galvenā iespēja veikt precīzus uzdevumus, piemēram, montāžu. To var arī palielināt līdz vairākiem bezpilota lidaparātiem, kā parādīts laboratorijas eksperimentos ar četriem bezpilota lidaparātiem un simulācijās ar pat deviņiem.
Turklāt TU Delft algoritms ņem vērā katra drona individuālās vilces robežas, novēršot pārslodzes un uzlabojot drošību. Saskaņā ar Sun teikto, pamatā esošā vadības metode izmanto reāllaika trajektorijas optimizāciju – “tehniku, kas līdzīga tai, ko izmanto SpaceX Starship precīzās nosēšanās laikā.”